Alex Crease
Engineer • Designer • Educator



Improved Stability and Control of a Low-Cost Prosthetic Knee
Losing a limb can be more than just a loss of mobility. In many areas, particularly in developing countries, stigmas associated with limb loss can result in social and familial ostracization. Providing prosthetics to people in these communities not only helps amputees regain mobility, but improves their quality of life and expands their opportunities.
The cost of a robust prosthetic can be upward of $10,000, unaffordable for the people who need it. LIMBS International developed the LIMBS International M3 Relief Knee, a robust prosthetic that costs less than a smartphone. While rugged, it lacks stability on uneven surfaces like stairs and hills, and is energy-expensive for the wearer, resulting in an uneven gait.
For our senior capstone, our team developed an adapter to enhance the performance of the existing LIMBS M3 Relief Knee.
The Challenge
Design an affordable addition to the LIMBS M3 Relief Knee that improves upon its stability and gait quality over uneven terrain.
The Solution
A low-intelligence hydraulic damper that regulates the knee’s internal resistance and stabilizes the knee to prevent collapse.
Solution Research
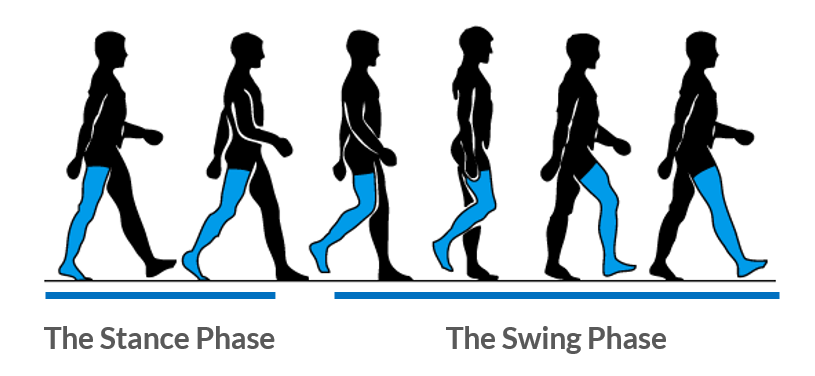
When we walk, we go through two primary phases of motion. The Stance Phase is when a limb is securely planted on the ground, and must be able to support a person’s weight. The Swing Phase is when the same limb is lifted off the ground and swung forward into the next Stance Phase.
Fall conditions occur at the beginning of the Stance Phase. The M3 knee is only stable when completely vertical, which creates injury risk on hills, stairs, and uneven ground.
Gait quality is determined by the Swing Phase. This impacts the wearer’s metabolic energy and comfort. Improved gait quality was secondary to stability but still an important factor for us.
Our Process
Phase 1: Research
We researched prosthetic solutions and standards, spoke with users and industry experts, and developed evaluation frameworks to measure our concepts against prioritized metrics.
We found a large divide in prosthetic knee systems: either top-end models with sleek designs and elaborate control schemes, or cheap and unstable knees with poor gait quality, and nothing in-between.
Phase 2: Idea Generation & Synthesis
Based on our core metrics we narrowed our solution scope down to ten feasible concepts that would reduce risk of injury during a fall.
Our most promising ideas modified the resistance of the knee joint, or locked the joint upon contact with the ground.
Phase 3: Design & Prototyping
We chose the two most promising concepts that balanced user safety, cost, and feasibility and iterated through looks-like, proof-of-concept, and functional prototypes.
Our two prototypes consisted of a passive stance-locking joint mechanism and a simple hydraulic damper system that responded to walking dynamics.
Phase 4: Testing & Feedback
We tested our knee prototypes on a user to assess system performance, collect user feedback, and record data to further refine the knee’s behavior. We also designed a set of test rigs to test each knee prototype for its stability and gait quality.
We determined that the dampening profile of the hydraulic knee would need to be modified depending on the height of user, and the stance-locking knee design had too much room for failure.
Phase 5: Refinement
After evaluation, we refined the design, cost, and performance of one of our two prototypes to present to LIMBS International at the end of the school year.
Our Solution
Our solution involved an electromechanical adaptation to the M3 Relief Knee that could be swapped in with a modified linkage and leg pylon. Instead of actuating the knee itself as many high-tech prostheses do, our design uses an integrated spring to drive the knee forward during the swing phase, and a hydraulic valve to lock the knee in place when embedded sensors detect the knee has reached the end of the swing phase.